Task Generalization with Stability Guarantees via Elastic Dynamical System Motion Policies
CoRL 2023 [website]
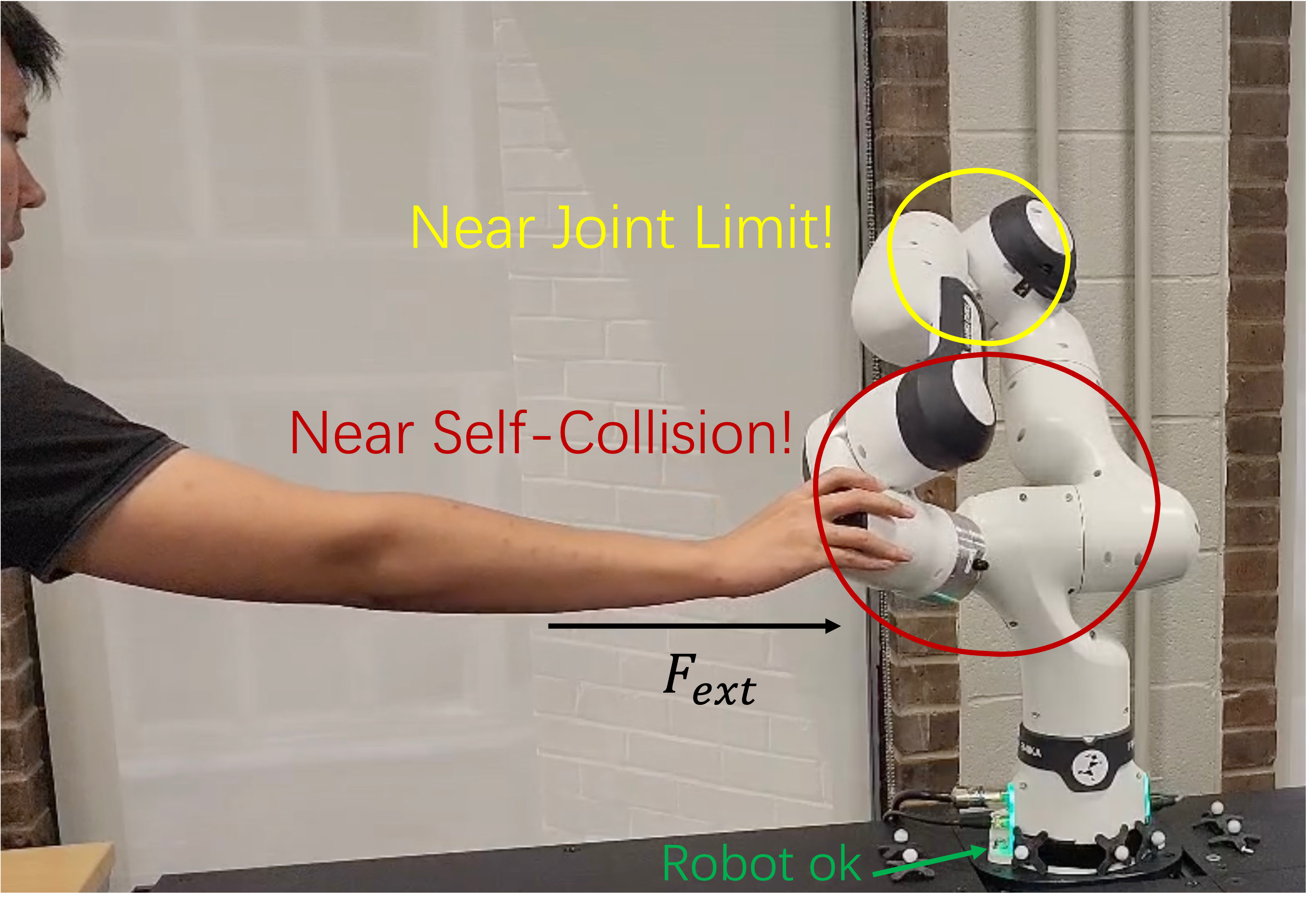
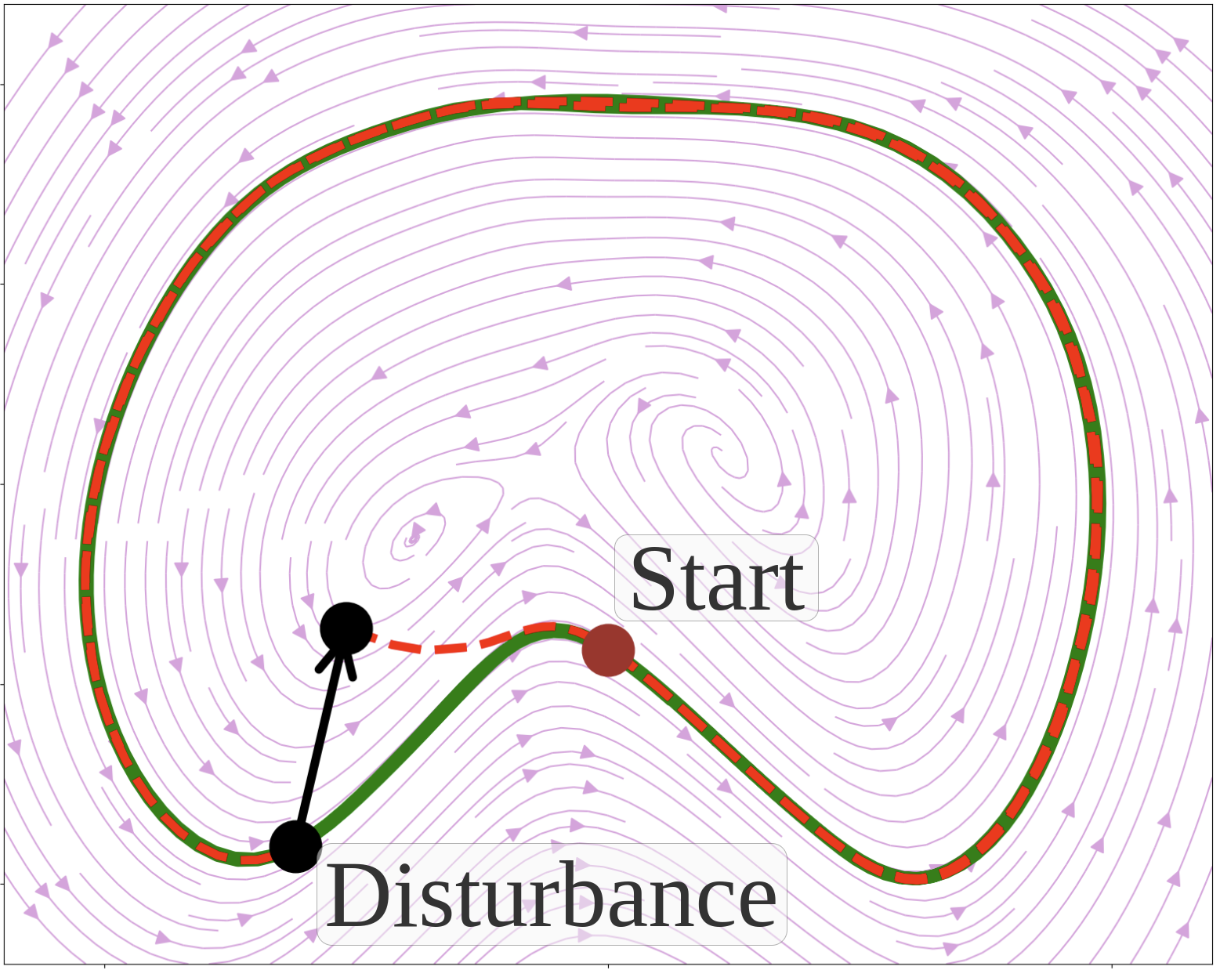
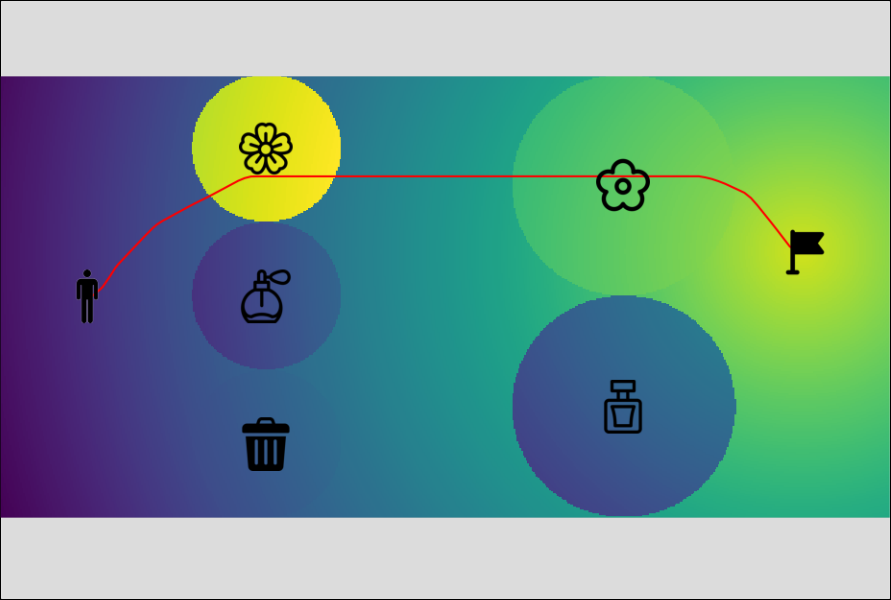
A dynamical system based motion policy LfD method with stability guarantees that can generalize to new task configurations without new demonstrations